The new "layered meshing" interface in Salvus allows us to declaratively
build meshes for complex multi-layered domains. In this example we'll give an
overview of how it can be used to create a mesh for a chunk of Monterey bay
which includes topography, bathymetry, thin near-surface layers, and the
ocean itself. We'll also use this opportunity to give a refresher on the
different "policy" types, and how they interact to form our final mesh. Let's
get started!
As always, the first step is to import the Salvus Python environment. Here
we'll add an extra import to the canonical Salvus namespace to bring the
layered meshing API into scope.
import pathlib
import numpy as np
import sympy
import xarray as xr
import salvus.namespace as sn
import salvus.mesh.layered_meshing as lmAs outlined in the 3D Surface
Topography
tutorial, the first thing we want to do when working with areas of Earth's
surface is to define our domain. We'll be working in UTM coordinates, and a
convenient way to handle coordinate conversions is to use the specialized
UtmDomain.from_spherical_chunk constructor that takes WGS84 coordinates and
converts them to an appropriate UTM domain. The UTM zone and coordinates
could of course also be specified directly.We choose a small box around Monterey, California, as below.
# Define our domain.
d = sn.domain.dim3.UtmDomain.from_spherical_chunk(
min_latitude=36.7,
max_latitude=36.5,
min_longitude=-122.5,
max_longitude=-121.8,
)
# Have a look at the domain to make sure it is correct.
d.plot()
All looks good. We see that we've selected a domain that is mostly comprised
of ocean, and which abuts Monterey to the east.
As outlined in the 3D Surface
Topography
tutorial, we'll use the GMRT web service to automatically download topography
and bathymetry for our domain. This is simple to do via the
domain object
itself.# Where to download topography data to.
topo_filename = "data/gmrt_topography.nc"
# Now query data from the GMRT web service.
if not pathlib.Path(topo_filename).exists():
d.download_topography_and_bathymetry(
filename=topo_filename,
# The buffer is useful for example when adding sponge layers
# for absorbing boundaries so we recommend to always use it.
buffer_in_degrees=0.1,
resolution="default",
)As this topography file is in spherical coordinates, we'll need to again
perform a coordinate transform to get this into the coordinates of Monterey's
UTM zone. Salvus has a built-in transformation function to do exactly this,
which takes the domain's UTM definition, and can be executed as below.
# Load the data to Salvus compatible SurfaceTopography object. It will resample
# to a regular grid and convert to the UTM coordinates of the domain. This will
# later be added to the Salvus project.
t = sn.topography.cartesian.SurfaceTopography.from_gmrt_file(
name="monterey_topo",
data=topo_filename,
resample_topo_nx=1501,
# If the coordinate conversion is very slow, consider decimating.
decimate_topo_factor=5,
# Smooth if necessary.
gaussian_std_in_meters=0.0,
# Make sure to pass the correct UTM zone.
utm=d.utm,
)As is true for the volumetric models we'll encounter shortly, the result of
this transformation is an
xarray
DataArray. These datasets are simple to manipulate and visualize, and we
can for instance plot the digital elevation model in the notebook by simply
plotting the `xarray`` dataset.topo_dem = t.ds.dem.T
topo_dem.plot()<matplotlib.collections.QuadMesh at 0x7f960778c810>

Looks like Monterey! We can see the classic subsea channel.
Before we begin the meshing process, its a good idea to think carefully at
the model we'll want to mesh. The following setup is hypothetical, but
derived from several common properties present on the exploration /
monitoring scale. Let's go over the layers we'll be considering.
A "layer" in this context refers to a material bounded by two interfaces.
We'll start by exploring the definitions of the materials.
Layer 1: Ocean
As we've mentioned earlier our chosen domain straddles the shoreline, and
we'll want to model the effects of the ocean itself. So, we'll first need to
consider how to define the ocean's properties. Let's first define the
properties and then loop back to explain the different components.
# Define an analytic parameter.
depth = sympy.symbols("depth")
# Define our ocean layer.
ocean_properties = lm.material.acoustic.Velocity.from_params(
vp=1500.0, rho=1010 + 40 * depth / 5000
)OK, let's unpack that.
-
depth = ...: The definition ofdepthabove introduces the ability to define "analytic" parameters with respect to model coordinates. Possible values here would be one ofx,y,z,v, ordepth.x,y, andzare the three Cartesian dimensions of our model, whilevis a generic coordinate corresponding to the vertical coordinate in a given dimension (yin 2-D andzin 3-D).depth, which we've used, is similar tovin that it is generic over the domain's dimension, but is defined instead with respect to the top surface of the domain. Analytic parameters are defined usingsympysymbols. -
ocean_properties = ...: Here we declare the material that defines our ocean -- an acoustic material defined by P-wave velocity and density. A variety of other materials, including multiple parameterizations for many, can be found in the layered meshing[materials](https://mondaic.com/docs/references/python_api/salvus/mesh/layered_meshing/material) submodule. Each argument to the.from_params(...)method associated with a given material's parameterization can take one of a constant value (as we've done forvp), a symbolic expression (as we've done forrho), or anxarrayDataArray(described below).
Layer 2: Near-surface
Below our ocean we'll define an elastic near-surface geotechnical layer that
is characterized by vertically and laterally varying parameters. Let's do
this below, and again circle back to explain the particulars.
# Density varies only with depth.
rho = xr.DataArray([1500.0, 1600.0], [("v_relative", [1.0, 0.0])])
# Velocity varies with our x coordinate and depth.
vs = xr.DataArray(
[[300.0, 600.0], [600.0, 900.0]],
[("x", [576065.0, 544662.0]), ("v_relative", [1.0, 0.0])],
)
# Define our propeties, using a simple scaling to compute vp from vs.
near_surface_properties = lm.material.elastic.Velocity.from_params(
vs=vs,
rho=rho,
vp=np.sqrt(3) * vs,
)Let's again unpack the above.
-
rho = ...: The definition of density here introduces the use of anxarray.DataArrayas a way to define discrete parameters.xarrayis a fantastic toolbox for working with regularly sampled data, and a host of tutorials and examples can be found on its website. Here we define a simple density model with two values that are associated with the coordinates"v_relative"."v_relative"is a parameter that is currently exclusive to discrete,xarray-based parameter representations, and is a flag telling Salvus to interpolate the model solely within its host layer, with the value atv_relative=1.0corresponding to the value at the layer's top interface, andv_relative=0.0to the value at the layer's bottom interface. This is handy to ensure that your parameter definition shrinks and stretches with any mesh deformations, as we'll se below. We could have alternatively used any of the other coordinate values outlined in the discussion surrounding analytic parameters, in which case the specified locations would be interpreted as absolute with respect to our coordinate system. The presence ofvin the phrasev_relativeholds the same meaning as before, in that it is a generalization of the vertical coordinate name. -
vs = ...: Here we expand on the definition ofrhoabove by defining a 2-D model forvs. We again usev_relativeto signal that we want the variation in the vertical direction to occur exclusively within the layer, but in this case also include an x coordinate to signal variation along the x direction. The values of the x coordinate here are absolute with respect to the UTM zone we'll be working in. In summary, then, we've defined avsmodel that vertically varies between 300.0 and 600.0 m/s in the east, which increases to between 600.0 and 900.0 m/s as we travel west. Note that thesexvalues do not span the entirety of our domain but they, along with the missingycoordinate, will be extruded to fit. -
vp = ...: Here we simply create avpmodel by scaling ourvsmodel by the square root of 3, which corresponds to a material with a Poisson's ratio of 0.25.
Layer 3: Compacted sediments
Below the near surface layer we defined a third layer which represents a
collection of compacted sediments. The definition of this layer is very
similar to that of the above.
# Velocity varies with depth.
vs = xr.DataArray([1000.0, 1500.0], [("v_relative", [1.0, 0.0])])
# Define our properties.
compacted_sediments_properties = lm.material.elastic.Velocity.from_params(
rho=1700.0, vs=vs, vp=np.sqrt(3 * vs)
)The only notable differences here with respect to layer 2 is the inclusion of
a constant density, and the fact that in this case our vs / vp values vary
only with the vertical coordinate. As previously, the inclusion of
"v_relative" informs Salvus that the materials should be interpolated with
respect to the layer's vertical bounds, and thus be shrunk or stretched
accordingly.Layer 4: Bedrock
Our final layer describes the bedrock model below the compacted sediments,
and is defined below.
bedrock_properties = lm.material.elastic.Velocity.from_params(
rho=xr.DataArray([1000.0, 2600.0], [("depth", [0.0, 15_000.0])]),
vp=xr.DataArray([1450.0, 6800.0], [("depth", [0.0, 15_000.0])]),
vs=xr.DataArray([1000.0, 3900.0], [("depth", [0.0, 15_000.0])]),
)Here we define all three parameters as varying solely in the vertical
direction, with one important change to what we've seen above. Similarly to
how we define the density in the ocean, we use
"depth" as the coordinate of
interest. This now means that, rather than interpolating uniformly between
the layer's bounding interfaces, we instead interpret the coordinates as the
absolute depth below the domain's top surface.For any discrete model specified as an
xarray dataset, we have a choice to
define a a model in any of the 0 to n dimensions of the domain, or any subset
of them. The missing dimensions will be added accordingly, and if they
defined model does not span the domain's extent in any of these dimensions it
will additionally be extruded to do so. The only restriction is that multiple
values can not be specified for a single coordinate, i.e. "depth" and
"v_relative" would be invalid.As specified above, a "layer" is a collection of materials and bounding
interfaces, and it is now time to consider the interfaces themselves. Before
doing this, its helpful to consider a schematic of what we're envisioning.
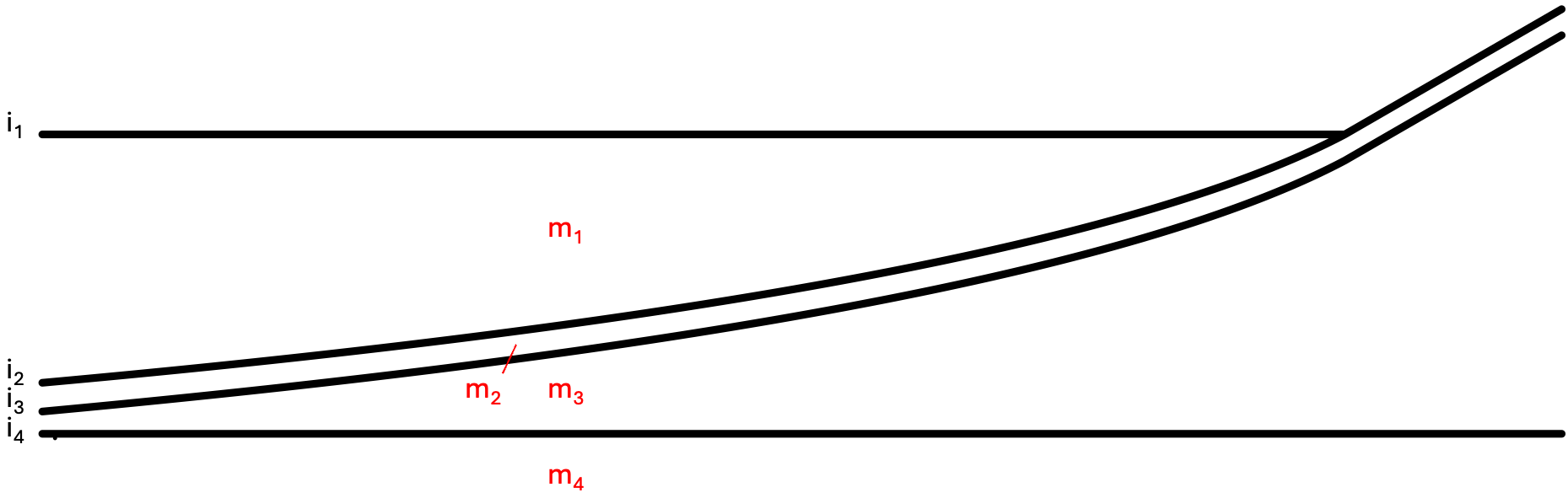
Above, we're considering an x-z cross section, moving east along the
horizontal axis. We can associate the four materials we've defined with
in the schematic, corresponding to the ocean, near-surface, sediment,
and bedrock layers respectively. If it was not already apparent that the
ocean layer would not span the entire domain, we now see that this will be
the case -- indeed the "bathymetry" becomes "topography" as we move onshore.
In general, explicit layers which with a vanishing thickness are not
supported in Salvus, and their future implementation is on Mondaic's longer
term technical roadmap. A special case, however, of a vanishing top layer
is currently supported, and we'll see below how to instruct the meshing
algorithms that this is our intent.
Interface 1: Ocean surface
With this basic skeleton in mind, let's now go and create out interfaces.
First, we start with the ocean surface.
ocean_surface = lm.interface.Hyperplane.at(0.0)Here we encounter our first type of interface: a
Hyperplane. A Hyperplane
is a simple interface in that it is always flat in whichever coordinate
system we choose. In this case we are requesting a flat interface at an
absolute elevation of 0.0 which defines our ocean surface, a Hyperplane in
spherical coordinates would represent a constant radial value. The value of
0.0 used in this case is relevant in the context of our UTM domain, where
elevation is provided with respect to mean sea level.Interface 2: Topography / bathymetry
More interesting than a flat interface is the one defined by the topography
file we downloaded above. Bringing this in to our layered mesh is simple.
Here we are directly taking the
xarray representation of our digital
elevation model (DEM) from the GMRT dataset we downloaded, and specifying
that it is also with reference to mean sea level.topography = lm.interface.Surface(
topo_dem.assign_attrs(reference_elevation=0.0)
)Interface 3: Bottom of near-surface layer
When looking at our schematic above, we see that the bottom of the
near-surface layer should follow the curvature of our surface topography. The
simplest way to implement this is just to take our surface topography and
shift it down by some amount. To do this we can use the
.map(...) attribute
on our newly-created surface topography object. This gives us access to the
xarray representation of the interface, and allows us to assign a new
reference elevation. Below, we shift the interface down by 200 meters, giving
us a layer with a consistent thickness of 200 m. It is also possible to use
the map interface to, for example, scale our topography or perform other
operations while keeping its basic structure constant.bottom_of_near_surface = topography.map(
lambda dem: dem.assign_attrs(reference_elevation=-200.0)
)Interface 4: Bottom of sediment layer
The final interface we specified in our schematic was the bottom of the
sediment layer. Here we again choose a
Hyperplane to declare our intent
that this interface is flat in our Cartesian coordinate system. We set the
depth of this layer to 4km below the top of the domain. Importantly, this is
below the bottom of the near-surface layer, so we do not have another layer
crossing boundaries.bottom_of_sediments = lm.interface.Hyperplane.at(lm.interface.Depth(4000.0))Interface 5: Bottom of domain
What we have not specified in our schematic, but which is of course
important, is a definition of the bottom of our domain. While this can be
encoded in our
Domain object, the UTMDomain classification leaves the top
and bottom bounds of the domain undefined and expects them to be specified at
the time of mesh generation. Our top surface has already been well defined --
by the ocean_surface and the topography interfaces, and it thus remains
to define our bottom interface. Below we define yet another Hyperplane to
specify the bottom of the domain, here at a depth of 10km below the surface.bottom_of_domain = lm.interface.Hyperplane.at(-10_000.0)With our materials and interfaces defined, we can now pull everything
together in a single
LayeredModel. This class is accessible from the
layered_meshing module we've already imported, and simple takes a list of
alternating interfaces and layers.layered_model = lm.LayeredModel(
[
ocean_surface,
ocean_properties,
topography,
near_surface_properties,
bottom_of_near_surface,
compacted_sediments_properties,
bottom_of_sediments,
bedrock_properties,
bottom_of_domain,
]
)Everything above can now be passed to the meshing entry point: the
mesh_from_domain function from the layered_meshing module. This takes our
domain and our layered model which we just defined, as well as a minimal
MeshResolution object that encodes properties like the order of model
representation, the elements per wavelength we're targeting, and the
reference frequency for which we want to generate the mesh. Let's go ahead
and execute it with the layered model we've put together.try:
lm.mesh_from_domain(
domain=d,
model=layered_model,
mesh_resolution=sn.MeshResolution(reference_frequency=1.0),
)
except ValueError as e:
print(f"ValueError: {e}")ValueError: After interpolation, layer boundaries have been found to cross.
Hmm... that didn't quite work. All is not lost, though, and the error message
above gives us insight into what's going on. Specifically, we see:
ValueError: After interpolation, layer boundaries have been found to cross.
This is, of course, not unexpected, as we discussed above that support for
crossing and "pinched-out" layers is only possible in specific circumstances.
As we're pinching out only the top layer of the mesh, this application is
indeed supported, and to activate this support we need to shortly discuss the
concept of coarsening "policies". To do this, let's revisit our schematic
from above.
Interlayer coarsening policies
"Interlayer" coarsening policies determine how the mesh size can change
between layers. We therefore should be able to define 4 policies, one for
each internal interface in our layered model. Our choices here include:
lm.InterlayerConstant(): enforce a constant element size between layerslm.InterlayerDoubling(): allow for a doubling of mesh size between layerslm.InterlayerTripling(): allow for a tripling of mesh size between layers
The default policy, if we don't specify one, is
InterlayerDoubling(), which
will attempt to insert one or more doubling layers at each interface where
the minimum wavelength jumps by at least factor of 2.Intralayer coarsening policies
"Intralayer" coarsening policies determine how the mesh size can change
within a given layer. We therefore should be able to define 4 policies, one
for each material in our layered model. Our choices for these policies
include:
lm.IntralayerConstant(): enforce a constant element size within each layerlm.IntralayerVerticalRefine(): allow for anisotropic coarsening within each layer, which can result in a variable number of elements in the vertical direction
The default policy, if we don't specify one, is
IntralayerConstant(), which
enforces a constant number of elements in the vertical direction within each
layer.Which policies to choose?
The question of how to choose the coarsening policies for a given application
is a complex and subtle one. Allowing for refinements necessarily negatively
affects our simulations time step, so we should not apply aggressive
coarsening with reckless abandon. On the other hand, coarsening between and
within layers can allow for a significant reduction in the total number of
elements, and, in the case of "pinching out" layers, ensure that we don't
create extremely small elements as the layer vanishes. The best choice for
nontrivial domains is often problem dependent, and should be made with care.
A thorough discussion of the different policies is beyond the scope of this
tutorial, and as such we simply justify our choices here. We choose four
intralayer policies in top-down order:
lm.IntralayerVerticalRefine(refinement_type="doubling", min_layer_thickness=100.0): For our top layer we will allow for a variable number of elements in the vertical direction and, most importantly, clip the minimum thickness of the layer at 100 meters. This will allow us to model the shoreline, as elements less than 100 meters thick will be removed from the resultant mesh.lm.IntralayerConstant(): We expect the geotechnical layer to be of a constant thickness, and so don't require any non-standard policy here.lm.IntralayerVerticalRefine(refinement_type="tripling"): Our third layer is also of variable thickness, so we again choose a policy allowing for a variable number of vertical elements. We don't specify a minimum thickness here as the layer does not pinch out, and we choose the"tripling"refinement type.lm.IntralayerConstant(): We again switch back to the default case of a structured mesh for the bedrock layer and below.
For interlayer policies, we choose the following in to-down order:
lm.InterlayerConstant()x2: We want to ensure that no coarsenings occur between the first and third layer. The reason for the top layer is that we don't want to place coarsenings where we expect a layer to pinch out, and for the second layer is that we want to avoid coarsening in very thin layers.lm.InterlayerDoubling(): Below the top two layers we relax our restrictions and allow the mesh to double the element size at will. This will ensure that faster velocities in deeper layers can be modelled using fewer elements.
With our chosen policies outlined above, we can try our mesh generation
again. To propagate this information down to the meshing algorithms we wrap
our
LayeredModel in a MeshingProtocol object which takes the policies as
arguments.mesh = lm.mesh_from_domain(
domain=d,
model=lm.MeshingProtocol(
layered_model,
intralayer_coarsening_policy=[
lm.IntralayerVerticalRefine(
refinement_type="doubling", min_layer_thickness=100.0
),
lm.IntralayerConstant(),
lm.IntralayerVerticalRefine(refinement_type="tripling"),
lm.IntralayerConstant(),
],
interlayer_coarsening_policy=[
lm.InterlayerConstant(),
lm.InterlayerConstant(),
lm.InterlayerDoubling(),
],
),
mesh_resolution=sn.MeshResolution(reference_frequency=1.5),
)The resulting mesh can be seen below. Let's take some time to explore its
features.
mesh
<salvus.mesh.data_structures.unstructured_mesh.unstructured_mesh.UnstructuredMesh object at 0x7f96091f7d50>
With our mesh now generated, we can pull it into
SalvusProject via an
UnstructuredMeshSimulationConfiguration.
For more information on this, please check out our collection of related
tutorials.Thanks for following!

PAGE CONTENTS